Research
Generative Geometry for Robot Autonomy
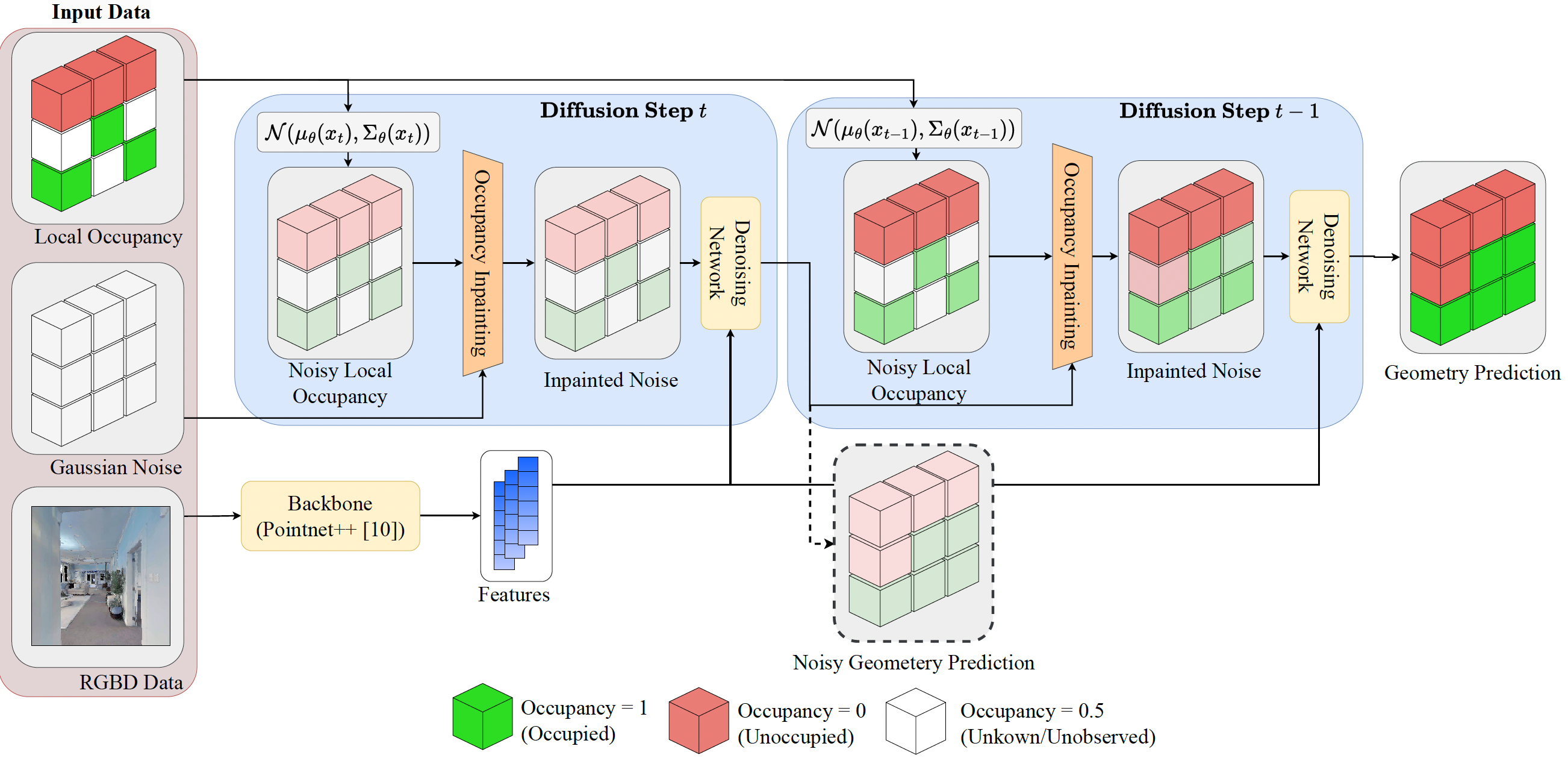
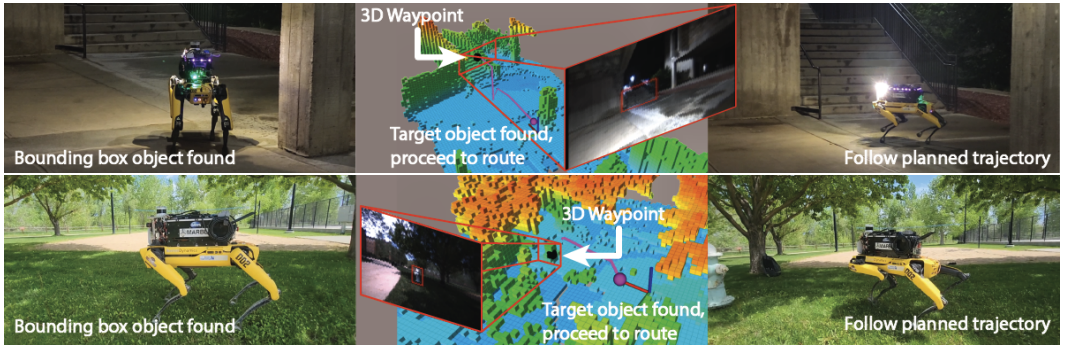
We develop diffusion-based generative models that synthesize 3D occupancy and semantic geometry from partial observations, enabling robots to predict and plan through unseen space.
Project page → GitHub →- Robust Robotic Exploration and Mapping Using Generative Occupancy Map Synthesis
- Octree Latent Diffusion for Semantic 3D Scene Generation and Completion
- Online Diffusion-Based 3D Occupancy Prediction at the Frontier
- SceneSense: Diffusion Models for 3D Occupancy Synthesis
- Looking Around Corners: Generative Methods in Terrain Extension
- Verified Path Following Using Neural Control Lyapunov Functions
Vision-Language Understanding & Navigation
From the SUN-Spot dataset to Spatial-LLaVA, we advance how robots understand spatial language, ground referring expressions in visual scenes, and navigate from natural language instructions.
Project page →- RF-Modulated Adaptive Communication Improves Multi-Agent Robotic Exploration
- Spatial-LLaVA: Enhancing LLMs with Spatial Referring Expressions
- CogExplore: Contextual Exploration with Language-Encoded Environment Representations
- ReCAP: Semantic Role Enhanced Caption Generation
- Tell Me Where to Go: A Composable Framework for Context-Aware Embodied Robot Navigation
- CRAPES: Cross-modal Annotation Projection for Visual Semantic Role Labeling
- SUN-Spot: An RGB-D Dataset With Spatial Referring Expressions
Multi-Robot Collaborative Perception
Building datasets and algorithms for multi-robot data association and collaborative perception in heterogeneous robot teams.
Project page →
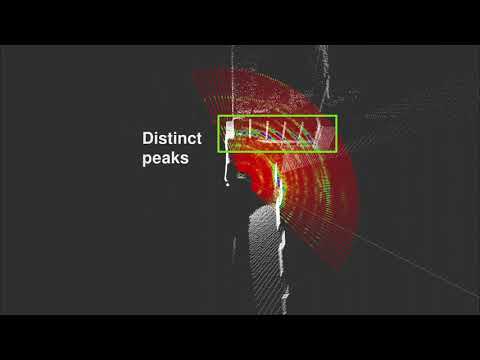
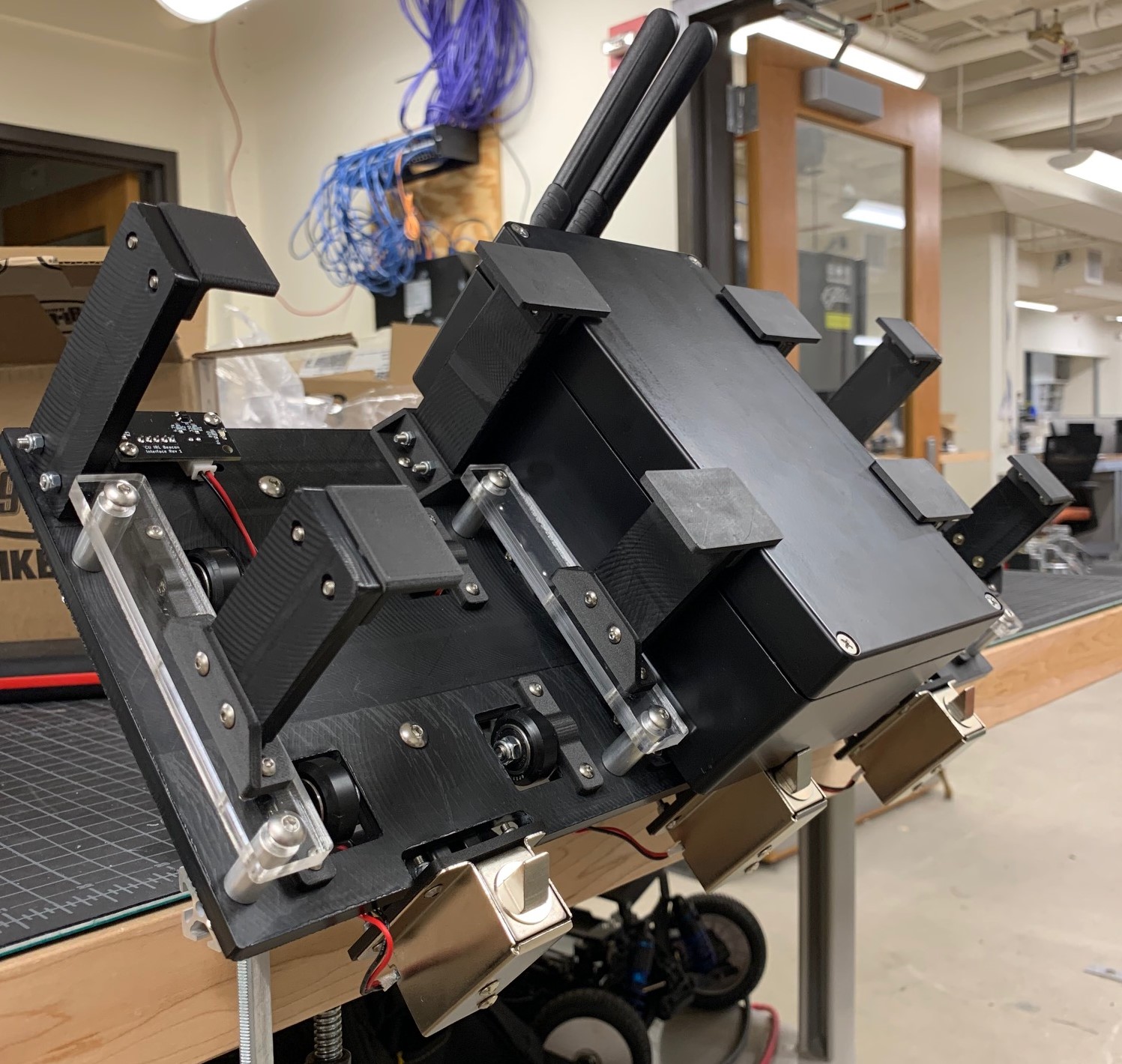
Millimeter Wave RADAR Perception
Pioneering the use of mmWave RADAR as a primary perception modality for robotics, from datasets to dense mapping in degraded visual conditions.
Project page →- A New Wave in Robotics: Survey on Recent mmWave Radar Applications
- RMap: Millimeter-Wave Radar Mapping Through Volumetric Upsampling
- Radar-Based Localization for Autonomous Ground Vehicles in Suburban Neighborhoods
- ColoRadar: The Direct 3D Millimeter Wave Radar Dataset
- Radar-Inertial Ego-Velocity Estimation for Visually Degraded Environments
Past Research
MARBLE: DARPA Subterranean Challenge
Multi-agent autonomy with RADAR-based localization for exploring underground environments. 3rd place, $500K prize.

Mixed Reality for Field Robot Emergency Response
Immersive mixed reality interfaces for supervision and telepresence with outdoor field robotic systems.
Light Source Estimation
Determining location, direction, intensity, and color of illuminants using physically-based rendering models.

Autonomous Vehicles & Agile Control
Terrain-aware model predictive control, game-theoretic lane changing, and high-speed autonomous navigation through challenging terrain.
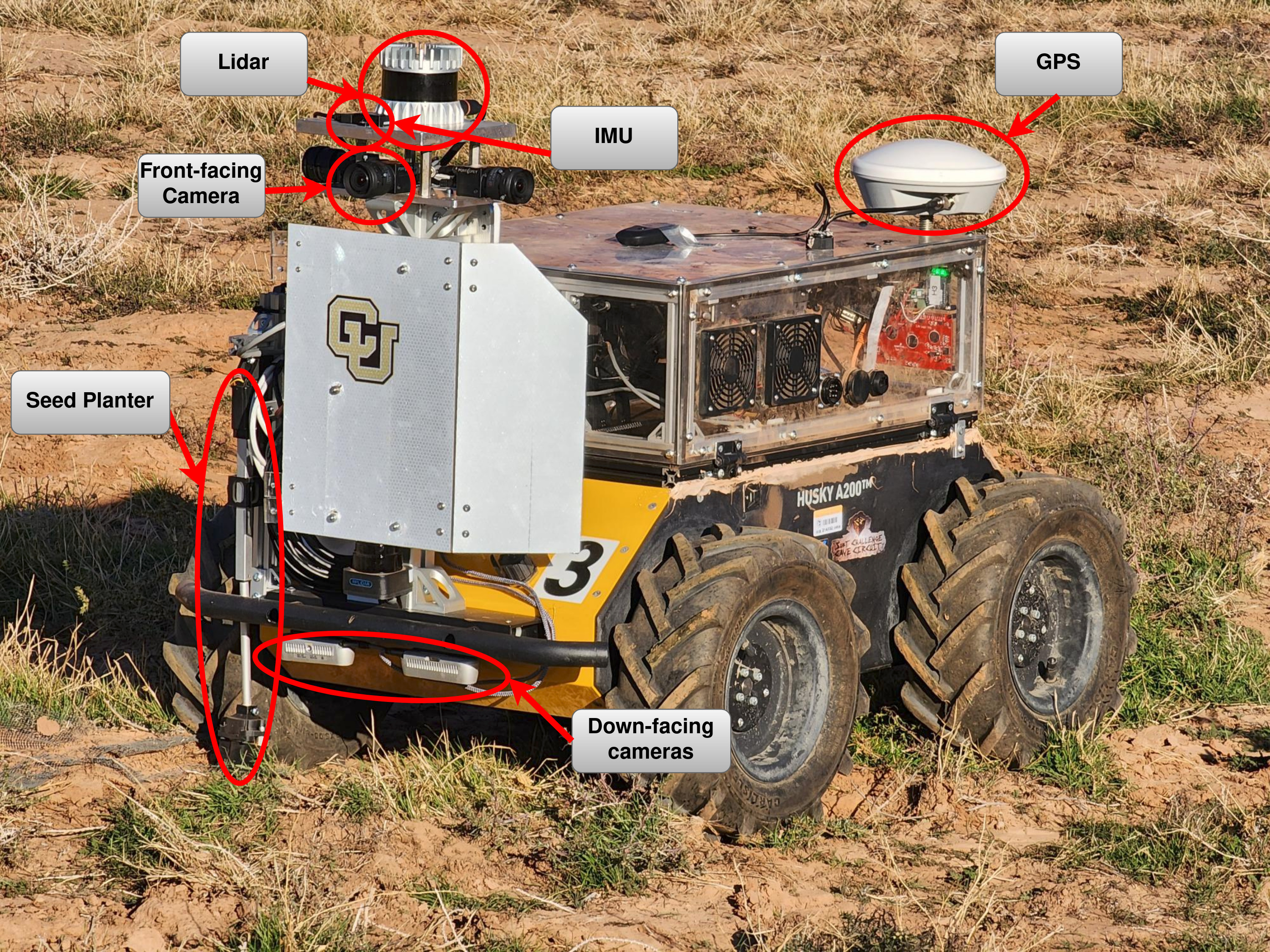
RestoreBot
Autonomous multi-agent systems for targeted seed planting in degraded rangelands.

Environmental Sensing
Low-cost radar sensors for field-based water level monitoring with sub-centimeter accuracy.
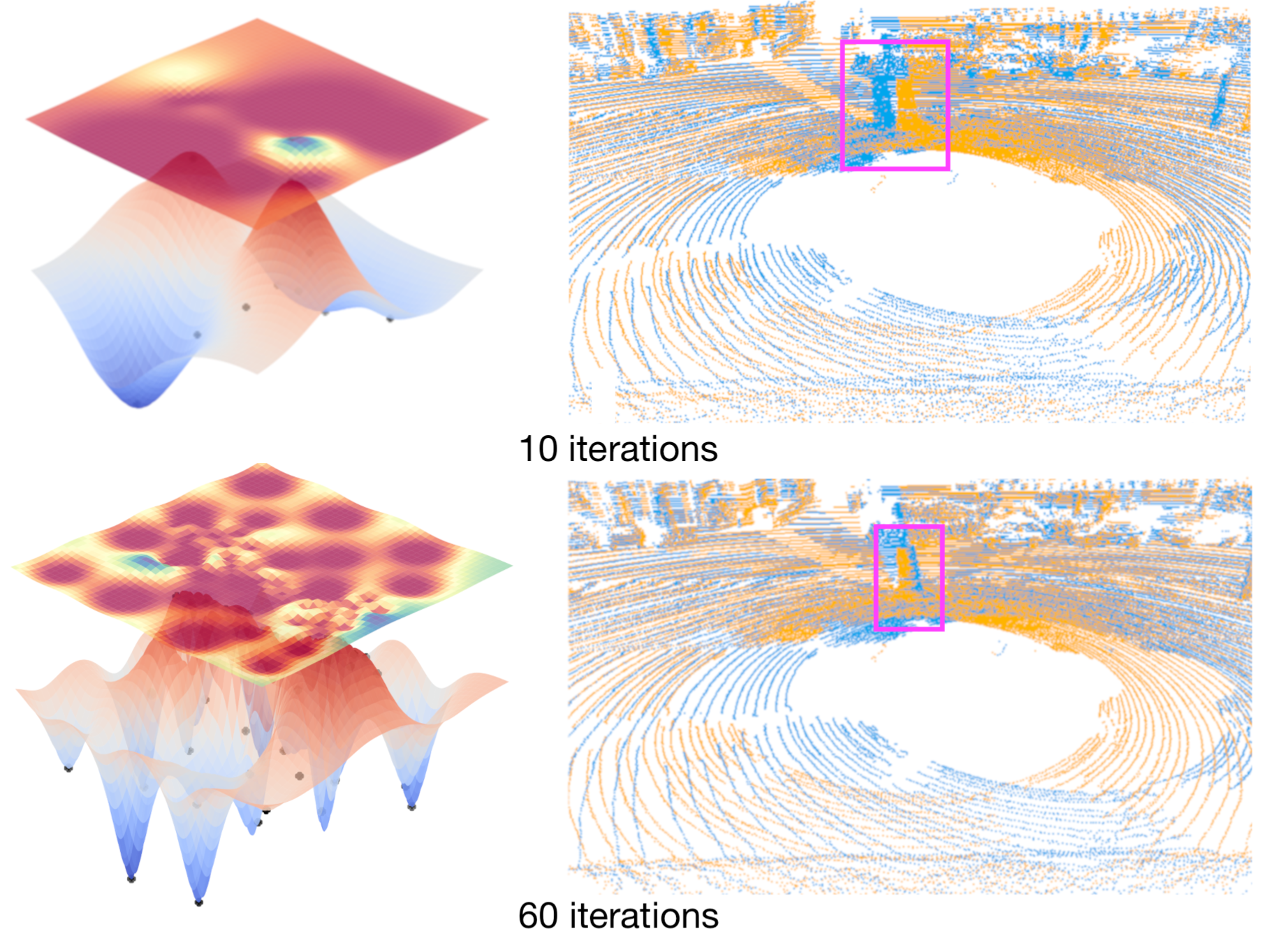
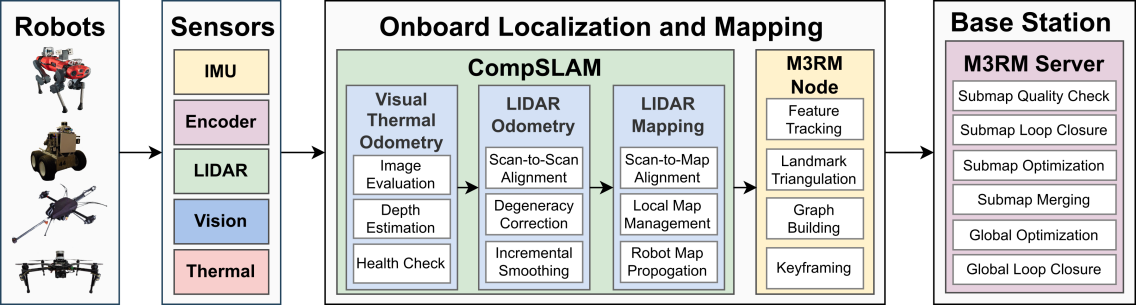
Calibration & SLAM
Online self-calibration, Bayesian optimization for ICP and Kalman filters, and robust SLAM pipelines.
Medical Robotics
Autonomous endoscope navigation and disease-robust cardiac MRI segmentation.